SoftZoo — это платформа для совместного проектирования мягких роботов, которая позволяет тестировать оптимальные формы и размеры для работы роботов в различных условиях.
С тех пор как в 2008 году был принят термин «мягкая робототехника», инженеры в этой области создают разнообразные представления гибких машин, полезных в исследовании, передвижении, реабилитации и даже в космосе. Один из источников вдохновения: то, как передвигаются животные в дикой природе.
Группа исследователей Массачусетского технологического института пошла дальше, разработав SoftZoo — платформу, вдохновленную биологическими факторами, которая позволяет инженерам изучать совместное проектирование мягких роботов. Эта платформа оптимизирует алгоритмы, состоящие из дизайна, который определяет, как будет выглядеть робот, и управления, или системы, которая обеспечивает движение роботов, улучшая то, как пользователи автоматически генерируют контуры потенциальных машин.
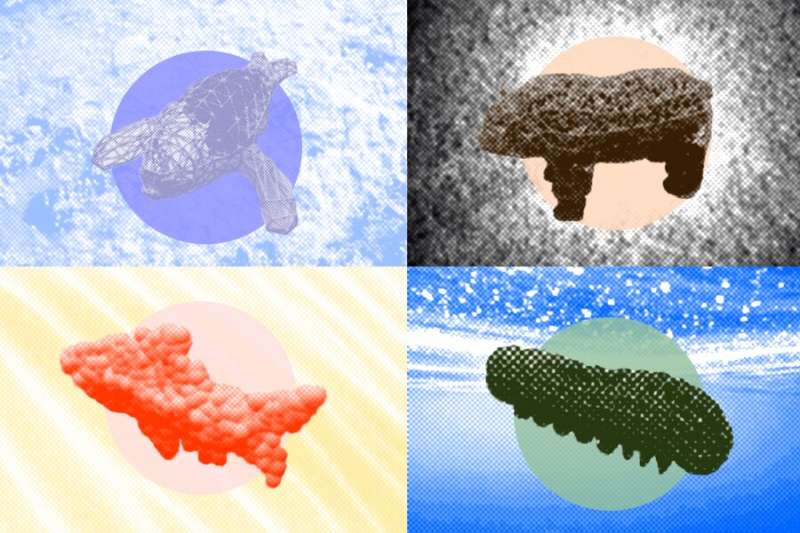
В платформе представлены 3D-модели животных, таких как медведи панда, рыбы, акулы и гусеницы, которые могут имитировать задачи мягкой робототехники, такие как локомоция, маневренный поворот и следование по пути в различных средах. Будь то снег, пустыня, глина или вода, платформа демонстрирует компромиссы в производительности различных конструкций на разных участках местности.
«Наша структура может помочь пользователям найти наилучшую конфигурацию для формы робота, позволяя им разрабатывать алгоритмы мягкой робототехники, которые могут делать много разных вещей», — говорит аспирант MIT Цун-Хсуан Ванг, сотрудник Лаборатории компьютерных наук и искусственного интеллекта (CSAIL), который является ведущим исследователем проекта. «По сути, это помогает нам понять лучшие стратегии взаимодействия роботов с окружающей средой».
SoftZoo является более комплексной, чем аналогичные платформы, которые уже моделируют дизайн и управление, потому что она моделирует движение, реагирующее на физические особенности различных биомов. Универсальность платформы обеспечивается дифференцируемым мультифизическим движком, который позволяет моделировать несколько аспектов физической системы одновременно, например, тюленя, поворачивающего на льду, или гусеницу, передвигающуюся по болотистой местности.
Дифференцируемость движка оптимизирует совместное проектирование, сокращая количество зачастую дорогостоящих симуляций, необходимых для решения задач вычислительного управления и проектирования. В результате пользователи могут проектировать и перемещать мягких роботов с помощью более сложных, заданных алгоритмов.
Способность системы моделировать взаимодействие с различной местностью иллюстрирует важность морфологии — отрасли биологии, изучающей формы, размеры и формы различных организмов. В зависимости от окружающей среды, некоторые биологические структуры являются более оптимальными, чем другие, подобно сравнению чертежей машин, выполняющих схожие задачи.
Эти биологические очертания могут вдохновить искусственную жизнь на более специализированную, учитывающую особенности местности. «Мягкая волнистая геометрия медузы позволяет ей эффективно перемещаться по большим водоемам